Notes
Topology and Topological Spaces: A Primer
The study of topological spaces is a generalisation of the concepts of metric spaces, as well as open and closed sets, both of which are important in real analysis. Informally, a topological space is a set that has a topology, which "decides" which subset is open or not.
Definition. A topology on a set is a collection of subsets of (in other words, ) which has the following properties:
- The empty set and itself are in .
- Any arbitrary union of subcollections of is in .
- Any finite intersection of subcollections of is in .
We can then say that a subset of is an open set if is in . One can compare this with the metric-space definition of open sets, which is the definition often adapted in real analysis courses and can allow us to derive the topological definition of open sets in , as described above.
One may then ask: what if it is the other way round, i.e. is it possible to produce a metric space from a topological space? In fact, this is a question that attracts so much interest that mathematicians assign a special name to those that have this property: metrizable spaces, which we shall learn later in this chapter.
This may look obvious to some, but for the sake of reminder: it is possible for a set to have multiple topologies. There is also a not-so-obvious one: different sets can have the same topology(!).
Concepts for Topologies
Fineness and Coarseness
Definition. Given (any) two topologies of a set , we say that is finer than if . We say is strictly finer than if .
Conversely, if (resp. ), then we say that is coarser (resp. strictly coarser) than .
We say and are comparable if either or , i.e. if it is possible to say if one is finer or coarser than the other.
Informally, a topology is finer if it "contains more detail" or "has a finer scale" than the other topology.
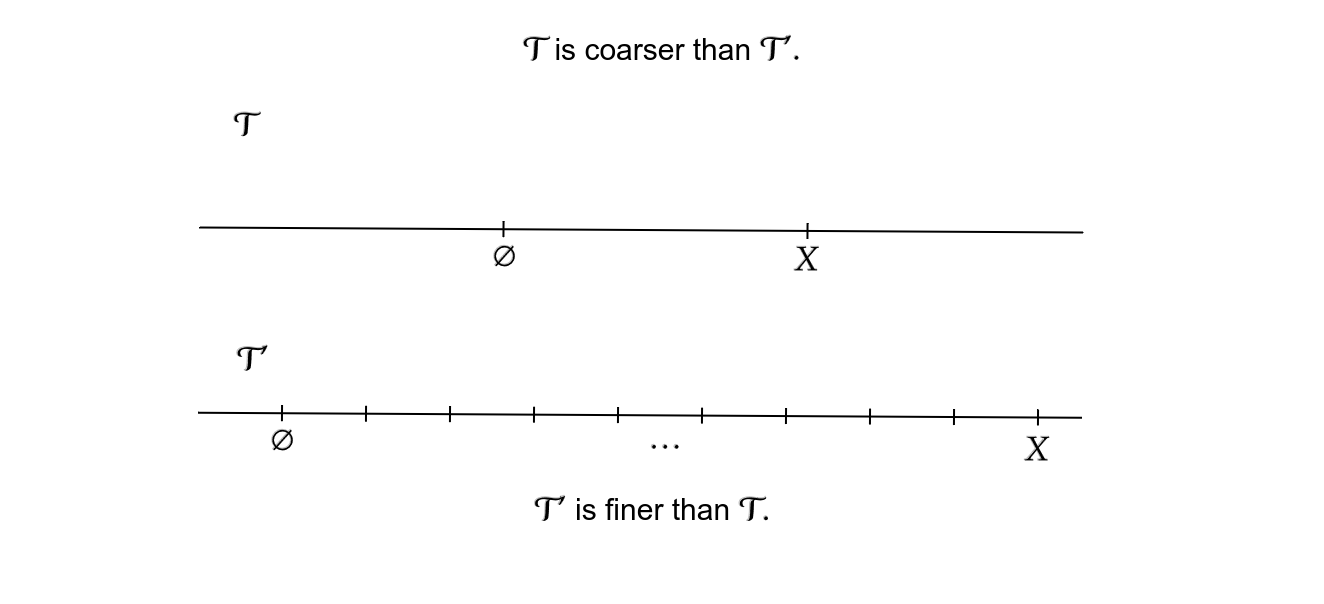
Note that if and are coarser/finer than each other, then they are the same topology.
Basis (for a Topology)
Basic building blocks of a topology.
Definition. Let be a set. A basis for a topology on is a collection of subsets of (which are called basis elements), denoted here as , such that for each :-
- There is at least one basis element that contains , i.e. .
- If , where and are (two) basis elements, then there is a (third) basis element such that and is contained by the intersection of and , i.e. . (Note: this is immediately true if : the desired will just be itself.)
The topology generated by the basis is then defined as: if a subset of is open (i.e. ), then for each , there is a basis element such that and . From the definition, we can see that the basis elements themselves are in the topology generated from them.
Why does this definition of basis-generated topology do give us a topology?
We need to check that a topology generated by a basis satisfies the basic definition of topology.
If , then vacuously because we cannot find any to check the condition of openness. If , then since every basis element satisfies , as well as the first condition for a basis, it also satisfies this condition of openness and is thus in .
To check that any arbitrary union of , i.e. , where is an indexed family of sets in , is still in , we see that since each is open, by definition, there is a basis element such that . Note that for any , so we have as well. This shows that is open and hence in .
To check that any finite intersection of , i.e. , where and , is in , we can do so by induction. We first settle the base case: for , itself is already in , so it immediately holds.
When so that we have , given , by definition, we can choose basis elements and such that (resp. ) and (resp. ). By the definition of a basis, we can obtain a basis element such that and . Since , this gives us , so , by definition.
This argument above can be used to prove the inductive case. For a finite intersection of elements of , we first suppose that does belong to . Now, note that
Therefore, by induction hypothesis and applying the argument above, we can conclude that any finite intersection of elements in belongs to .
We have then checked that all three conditions of a topology are satisifed, so indeed gives us a topology.
If is any set, the collection of all one-point subsets (singletons) of is a basis for the discrete topology on . Why?
Let be a set and be the collection of all one-point subsets of . Since there is a one-to-one correspondence, specifically , between and , this allows us to conclude that for any , there exists at least one basis element such that , giving us the first condition for a basis. Due to this one-to-one correspondence as well, there is no elements in that belongs to two different basis elements, so the second condition for a basis holds vacuously.
Any arbitrary union of the one-point subsets will give us , i.e. the collection of all subsets of except for the empty set, and this indeed includes itself. Any finite intersection of will then give us the last piece of the puzzle: the empty set .
This finally gives us the complete , i.e. the discrete topology on .
[Lemma 13.1] as a topology on a set that is generated by a basis can also be described as the collection of all unions of elements of . Why?
For any given collection of elements of , since they are also elements of and is a topology, their union is also in .
Conversely, for any , we can find for each a basis element such that , so , and thus equals a union of elements of .
This means that any open set in can be expressed a union of basis elements, which sounds analogous to bases in linear algebra in which vectors are expressed as a linear combination of basis vectors. However, such expression needs not be unique, which makes it different from bases in linear algebra, which are unique.
In reverse, we can also obtain a basis for a given topology, which is a frequently cited fact in the study of this topic.
[Lemma 13.2] Let be a topological space. Suppose that is a collection of open sets of such that for each open set of and each in , there is an element of such that , then is a basis for the topology of . Why?
We need to check that satisifies the defining conditions of a (topological) basis. Since is a topological space and thus is an open set itself, by the hypothesis for , for each , there is an element of such that , so the first condition is satisfied.
To check the second condition, suppose that , where . Since and are open, so is . Therefore, there exists by hypothesis an element in such that .
Let be the collection of open sets of ; we also need to show that the topology generated by is indeed equal to the topology . First, note that if belongs to and if , then there is by hypothesis an element of such that , so belongs to the (generated) topology . Conversely, if belongs to the (generated) topology , then equals a union of elements of , by Lemma 13.1. Since each element of belongs to and is a topology, also belongs to .
[Lemma 13.3] Let and be bases for the topologies and , respectively, on , then is finer than if and only if for each and each basis element containing , there is a basis element such that .
Proof of Lemma 13.3.
. Given an element of , we wish to show that . Let . Since generates , there is an element such that . By hypothesis, there exists an element such that , then , so by definition.
. Let and , with . Now belongs to by definition and by hypothesis (being finer). Therefore, . Since is generated by , there is an element such that .
Using Lemma 13.3, we can see that the collection of all circular regions in the plane generates the same topology as the collection of all rectangular regions.
Definition. A subbasis for a topology on is a collection of subsets of whose union equals . The topology generated by the subbasis is defined to be the collection of all (arbitrary) unions of finite intersections of elements of .
Sanity check of the definition of subbasis-generated topology.
It suffices to show that the collection of all finite intersections of elements of is a basis for , as we can then apply Lemma 13.1 to conclude that the collection of all unions of elements of is indeed a topology as desired.
Given , it belongs to an element of by definition of subbasis, so it also belongs to an element of ; this shows the first condition for a basis. To check the second condition (that involves intersection), consider the following two elements of ,
Their intersection
is also a finite intersection of elements of , so it belongs to .
Munkres' definition of subbasis here is different from that given in the corresponding Wikipedia article. In Wikipedia's definition, the topology generation is considered given, rather than a consequence.
It is also worth noting that in Rudin's Functional Analysis, a subbasis is defined to be a subcollection of an established topology such that the collection of open sets consisting of all finite intersections of elements of forms a basis for the topology. This is something that requires proof in Munkres, but is taken for granted in Rudin.
Don't think of the use of the prefix 'sub' in the word 'subbasis' here in the same way as the way as 'subset' does, but more like the word 'subpar': it doesn't mean that it is contained by a larger (topological) basis as a collection of basis elements; instead, think of it as 'something that is not quite a basis yet but serves a foundation to it.'
Important Topologies
There are several main topologies covered in this chapter. Some of them are so important that they deserve a dedicated subsection, whereas some others that are not so much are just included as an item of a bullet list here. Here, we denote a set as , and its equipped topology, unless otherwise stated, as .
- Discrete topology: the collection of all subsets of .
- Indiscrete/trivial topology: the other end of the extreme, i.e. the collection of only and itself.
- Finite complement topology (a.k.a. cofinite topology), : the collection of all subsets of such that is either finite or itself (so that ).
- Countable complement topology, : the collection of all subsets of such that is either countable or itself (so that ).
- Standard topology (on the real line), : the topology generated by the collection of all open intervals in the real line, . This is assumed to be the default topology for , unless otherwise stated.
- Lower limit topology, : the topology generated by the collection of all half-open intervals of the form , where .
- K-topology, : the topology generated by the collection of all open intervals , along with all sets of the form , where .
[Lemma 13.4] The topologies of and are strictly finer than the standard topology on , but are not comparable with one another.
Proof of Lemma 13.4.
Let , and be the standard -topology, lower limit topology and K-topology respectively. Lemma 13.3 will be applied in the proof here.
Given a basis element for and a point inside , the basis element for contains and lies in . On the other hand, given the basis element for , there is no open interval that contains and lies in . Thus is strictly finer than .
Similarly, given a basis element for and a point of , this same interval is a basis element for that contains . On the other hand, consider the basis element for and the point of , there is no open interval that contains and lies in (any open interval that contains must contain for some ). Thus, is strictly finer than .
The proof for the non-comparability between and is a solution to Exercise 13.6.
Order Topology
An order topology is the generalisation of the topologies on that are generated by intervals to any set with a simple order (a.k.a. strict total order).
Definition. Let be a set with a simple order relation and assume that has more than one element. Let be the collection of all sets of the following types:
- All open intervals in .
- All intervals of the form , where is the smallest element (if any) of .
- All intervals of the form , where is the largest element (if any) of .
The collection is then a basis for a topology on , which is called the order topology.
If has no smallest element, there are no sets of the second type. If has no largest element, there are no sets of the third type.
Check that the collection is a basis.
-
Indeed, every element of lies in at least one element of : the smallest element (if any) is in all sets of the second type, the largest element (if any) is in all sets of the third type and every other element is in a set of the first type.
-
The intersection of any two sets of the preceding types is again a set of one of these types, or is empty (if the two sets are disjoint).
Assuming the two sets are not disjoint,
- the intersection of two open intervals and is , an open interval;
- the intersection of two intervals and is ;
- the intersection of two intervals and is ;
- the intersection of two intervals and is .
- the intersection of two intervals and is ;
- the intersection of two intervals and is .
Definition. If is an ordered set, and is an element of , there are four subsets of that are called rays determined by . They are the following:
Sets of the first two types are called open rays, and sets of the last two types are called closed rays.
:::
Subspace Topology (a.k.a. Induced Topology)1
Definition. Let be a topological space with a topology . If is a subset of , then the collection
which are all intersections of open sets of with , is a topology on , and we call it the subspace topology. With this topology, is called a subspace of .
[Lemma 16.1] If is a basis for the topology of then the collection
is a basis for the subspace topology on .
[Lemma 16.2] Let be a subspace of . If is open in and is open in , then is open in .
[Theorem 16.3] If is a subspace of and is a subspace of , then the product topology on is the same as the topology inherits as a subspace of .
Given an ordered set , let us say that a subset of is convex in if for each pair of points of , the entire interval of points of lies in .
(Note that this implies that intervals and rays in are convex in .)
[Theorem 16.4] Let be an ordered set in the order topology; let be a subset of that is convex in . Then the order topology on is the same as the topology inherits as a subspace of .
Note that without the restriction that needs to be convex in , Theorem 16.4 is not true in general.
A counterexample is given as follows: let . The dictionary order on is just the restriction to of the dictionary order on the plane . However, the dictionary order topology on is NOT the same as the subspace topology on obtained from the dictionary topology on ! For example, the set is open in in the subspace topology, as it is the intersection of with and is open in , but is not open in the order topology, as any basis element for the order topology on that contains must contain points of such that the first coordinate is between and .
Indeed, is not convex because lies in the interval , where , but .
(The set in the dictionary order topology is called the ordered square, denoted by .)
To avoid ambiguity, whenever is an ordered set in the order topology and is a subset of , we shall assume that is given the subspace topology unless specifically stated otherwise.
Product Topology (+ Box Topology)
Forming new topologies from old ones.
Product Topology on
Definition. Let and be topological spaces. The product topology on is the topology generated by the collection of all sets of the form as the basis, where is an open subset of and is an open subset of .
Check that the collection is a basis.
-
Indeed, is a basis element ( and themselves open), and they contain all of the elements of .
-
The intersection of any two basis elements and is another basis element, since .
Note that the collection itself is not a topology on , but it is open in .
[Theorem 15.1] If is a basis for the topology of and is a basis for the topology of , then the collection
is a basis for the topology of .
Definition. Define the projections by and by .
It follows that where is open in is and where is open in is , so .
[Theorem 15.2] The collection
is a subbasis for the product topology on .
Product Topology in General + Box Topology
There are two possible ways to define a product topology on more general Cartesian products with finite or infinite dimensions, i.e. Cartesian products in the form of and , where each is a topological space, which are the following:
- Box topology: topology generated by taking as basis all sets of the form in the first case, and of the form in the second case, where is an open set of for each .
- Product topology: topology generated by taking as a subbasis all sets of the form (recall that represents the projection function), where is any index and is an open set of .
How do these topologies differ? Let be a basis element for the second topology, then it is a finite intersection of subbasis elements , say for , then a point belongs to if and only if belongs to for ; there is no restriction on for other values of .
It follows that the two topologies above agree for the finite Cartesian product but differ for the infinite product.
Now, we shall introduce a more general notion of Cartesian products, which are formed by a family of sets indexed by an arbitrary set, instead of a subset of .
Definition. (Tuples with arbitrary index). Let be an index set. Given a set , we define a -tuple of elements of to be a function . If is an element of , we often denote the value of at by rather than ; we call the the -th coordinate of . We also often denote the function itself by the symbol , which is as close as we can come to a 'tuple notation' for an arbitrary index set . We denote the set of all -tuple of elements of by .
Definition. (Cartesian products with arbitrary index). Let be an indexed family of sets; let . The Cartesian product of this indexed family, denoted by , is defined to be the set of all -tuples of elements of such that for each , i.e. it is the set of all functions such that for each .
If such Cartesian product is formed by an indexed family such that all its component sets are non-empty, the assertion that this Cartesian product is non-empty, i.e. there exists such function , is equivalent to the Axiom of Choice.
A proof of this equivalence is a solution to Exercise 19.9.
Definition. (Box topology for arbitrarily indexed Cartesian products). Let be an indexed family of topological spaces. Let us take as a basis for a topology on the product space the collection of all sets of the form , where is open in , for each . The topology generated by this basis is called the box topology.
Definition. (Projection mapping for arbitrarily indexed Cartesian products). Generalising the subbasis formulation of the definition, we call the function that assigns to each element of the product space its -th coordinate, i.e. the projection mapping associated with the index .
Definition. (Product topology and product spaces for arbitrarily indexed Cartesian products). Let denote the collection , and let denote the union of these collections, i.e. . The topology generated by the subbasis is called the product topology. In this topology is called a product space.
[Theorem 19.1] (Comparison of the box and product topologies). The box topology on has as basis all sets of the form , where is open in for each . The product topology on has as basis all sets of the form , where is open in for each and equals except for finitely many values of .
Consider the basis that (as defined above) generates. The collection consists of all finite intersections of elements of . We consider two cases.
Case I: the elements in the intersection belong to the same one of the sets . We then do not get anything new, because
is still an element of . The same applies for finitely many elements of .
Case II: the elements in the intersection come from different sets in . The typical element of the basis can then be described as follows: Let be a finite set of distinct indices from the index set , and let be an open set in for , then
is also the typical element of .
Now, a point is in if and only if its -th coordinate is in , its -th coordinate is in , and so on. There is no restriction whatsoever on the -th coordinate of if is not one of the indices . Hence, we can write as the product
where denotes the entire space if .
Since a number of key theorems about finite products will also hold for arbitrary products if we use the product topology, but note if we use the box topology, whenever we consider the product , we shall assume it is given the product topology unless specifically stated otherwise.
-
[Theorem 19.2] (Basis inheritance). Suppose the topology on each space is given by a basis , then the collection of all sets of the form , where for each , will serve as a basis for the box topology on .
The collection of all sets of the same form, where for finitely many indices and for all the remaining indices, will serve as a basis for the product topology .
-
[Theorem 19.3] (Subspace inheritance). Let be a subspace of , for each , then is a subspace of if both products are given the box topology, or if both products are given the product topology.
-
[Theorem 19.4] (Hausdorff inheritance) If each space is Hausdorff, then is a Hausdorff space in both the box and product topologies.
-
[Theorem 19.5] (Closure inheritance). Let be an indexed family of spaces; let for each . If is given either the product or the box topology, then
[Theorem 19.2] (Basis inheritance). Suppose the topology on each space is given by a basis , then the collection of all sets of the form , where for each , will serve as a basis for the box topology on .
The collection of all sets of the same form, where for finitely many indices and for all the remaining indices, will serve as a basis for the product topology .
[Theorem 19.3] (Subspace inheritance). Let be a subspace of , for each , then is a subspace of if both products are given the box topology, or if both products are given the product topology.
[Theorem 19.4] (Hausdorff inheritance) If each space is Hausdorff, then is a Hausdorff space in both the box and product topologies.
[Theorem 19.5] (Closure inheritance). Let be an indexed family of spaces; let for each . If is given either the product or the box topology, then
The proofs of Theorems 19.2, 19.3 and 19.4 are given in a solution to Exercises 19.1, 19.2 and 19.3 respectively.
Proof of Theorem 19.5.
Let be a point of . We show that . Let be a basis element for either the box or product topology that contains . Since , we can chooise a point for each (see Theorem 17.5 below). Then belongs to both and . Since is arbitrary, it follows that belongs to the closure of .
Conversely, suppose lies in the closure of , in either topology. We show that for any given index , we have . Let be an arbitrary open set of containing . Since is open in in either topology, it contains a point of . Then belongs to . It follows that .
[Theorem 19.6] (Continuity inheritance). Let be given by the equation
where for each . Let have the product topology. Then the function is continuous if and only if each function is continuous.
Theorem 19.6 fails if we apply the box topology. A counterexample is given as follows:
Consider , the countably infinite product of with itself. Recall that .
Define a function by the equation
the -th coordinate function of is the function , i.e. . Each of the coordinate functions is continuous, but is not continuous if is given the box topology.
Consider, for example, the basis element for the box topology (which is certainly an open subset of ). We assert that is not open in . If were open in , it would contain some interval () about the point (because ). This would mean that , so that, by applying to both sides of the inclusion, we have
for all , which is a contradiction as it is impossible.
Metric Topology
Definition. A metric on a set is a function having the following properties:
- (Positive definite) for all ; equality holds if and only if .
- (Symmetry) for all .
- (Triangle inequality) , for all .
The number , where is a metric on , is often called the distance between and in the metric .
Given , the set is called the -ball centred at .. When no confusion arises, the subscript can be omitted.
Definition. If is a metric on the set , then the collection of all -balls , for and , is a basis for the topology on , called the metric topology induced by .
The definition of the metric topology can be rephrased as follows:
A set is open in the metric topology induced by if and only if for each , there is a such that .
Definition. If is a topological space, is said to be metrizable if there exists a metric on the set that induces the topology of . A metric space is a metrizable space together with a specific metric that gives the topology of .
Many important topological spaces are metrizable, but some are not.
For example, with the order topology is metrizable. Indeed, the Euclidean metric is the metric that induces the topology. To see this, note that each basis element for the order topology is a basis element for the metric topology; indeed, where and . Conversely, each -ball equals an open interval: the interval .
A discrete topology is also metrizable. It can be induced by the discrete metric, defined by .
Definition. Let be a metric space with metric . A subset of is said to be bounded if there is some number such that for every pair of points of .
If is bounded and non-empty, the diameter of is defined to be the number .
[Theorem 20.1] Let be a metric space with metric . Define by the equation , then is a metric that induces the same topology as .
The metric is called the standard bounded metric corresponding to .
Definition. Given in , we define the norm of by the equation
we define the Euclidean metric on by the equation
We define the square metric by the equation
[Lemma 20.2] Let and be two metrics on the set ; let and be the topologies they induce, respectively. Then is finer than if and only if for each in and each , there exists such that .
[Theorem 20.3] The topologies on induced by the Euclidean metric and the square metric are the same as the product topology on .
Let and be two points of . By algebraic manipulation, we obtain that
In other words, the metrics and are (topologically) equivalent. In fact, as shown above, these two particular metrics are strongly equivalent, which implies topological equivalence.
The first inequality shows that whereas the second equality shows that .
Now, we show that the product topology is the same as that given by the metric . First, let
be a basis element for the product topology, and let be and element of . For each , there is an such that
choose . Then , since if , then the maximum of is less than , which implies that for each ; since for each , it follows that for each , so . As a result, the -topology is finer than the product topology.
Conversely, let be a basis element for the -topology. Given the element , we need to find a basis element for the product topology such that , and this is immediate: we can just take , which itself is a basis element for the product topology.
Now we consider the infinite Cartesian product . It is natural to try generalising the metrics and to this space in the following ways:
but both of the equations above do not always make sense, though equation (1) does define a metric on a certain important subset of (see Exercise 20.10), whereas equation (2) makes sense when the metric is replaced by the standard bounded metric.
Definition. Given an index set , and given points and of , let us define a metric on by the equation
where is the standard bounded metric on . One can check that is indeed a metric; it is called the uniform metric on , and the topology it induces is called the uniform topology.
[Theorem 20.4] The uniform topology on is finer than the product topology and coarser than the box topology; these theree topologies are all different if is infinite.
[Theorem 20.5] Let be the standard bounded metric on . If and are two points of , define
Then is a metric that induces the product topology on .
Theorem 20.5 shows that if is infinite, then is metrizable if and only if is countable and has the product topology.
Now, we consider the relation of the metric topology to other topological concepts:
- Subspaces or metric spaces behave as expected: if is a subspace of the topological space and is a metric for , then the restriction of to is a metric for the topology of . A proof of this is shown in Exercise 21.1.
- There is not much to be said regarding order topologies; some are metrizable, some are not.
- The Hausdorff axiom is satisfied by every metric topology. Indeed, if and are distinct points of the metric space , then we let ; the triangle inequality implies that and are disjoint.
- For product topologies, Theorem 20.5 shows that countable products of metrizable spaces are metrizable. A proof of this is given in Exercise 21.3.
- For continuous functions, the familiar '- definition' of continuity carries over to general metric spaces, and so does the sequential criterion. We can also see that we can construct continuous functions through 'arithmetic operations' or by applying uniform limit theorem.
[Theorem 20.1] Let ; let and be metrizable with metrics and , respectively. Then continuity of is equivalent to the requirement that given and given , there exists such that
[Lemma 21.2] (The sequence lemma). Let be a topological space; let . If there is a sequence of points of converging to , then ; the converse holds if is metrizable.
Suppose that , where , then every neighbourhood of contains a point of , so by Theorem 17.5.
Conversely, suppose that is metrizable and . Let be a metric for the topology of . For each positive integer , take the neighbourhood centred at and of radius . Choose to be a point of its intersection with . We assert that the sequence converges to : note that any open set containing contains an -ball centred at , so if we choose so that (possible by Archimedean property), then contains for all .
[Theorem 21.3] (Sequential criterion of continuity). Let . If the function is continuous, then for every convergent sequence in , the sequence converges to . The converse holds if is metrizable.
Suppose that is continuous. Given , we wish to show that . Let be a neighbourhood of , then is a neighbourhood of , so there is an such that for , thus for .
Conversely, assume that the convergent sequence condition is satisfied. Let be a subset of ; we show that (which is equivalent to continuity by Theorem 18.1). If , then there is a sequence of points of converging to (by Lemma 21.2). By assumption, the sequence converges to . Since , Lemma 21.2 implies that (Note that the metrizability of is not needed.) Hence , as desired.
Incidentally, in the proof of Lemma 21.2 and Theorem 21.3, we only required the countable collection of balls about instead of using the full strength of metrizability. This leads us to make a new definition.
A space is said to have a countable basis at the point if there is a countable collection of neighbourhoods of such that any neighbourhood of contains at least one of the sets . A space that has a countable basis at each of its points is said to satisfy the first countability axiom.
A metrizable space always satisfies the first countability axiom, but the converse is not true.
[Lemma 21.4] The addition, subtraction and multiplication operations are continuous functions from into ; the quotient operation is a continuous function from into .
A proof of this lemma is a solution to Exercise 21.12.
[Theorem 21.5] ('Arithmetic operations' on continuous functions). If is a topological space, and if are continuous functions, then , , and are continuous. If for all , then is continuous.
The map defined by
is continuous, by Theorem 18.4 (see below). The function equals the composite of and the addition operation , which we know is continuous by Lemma 21.4, thus is continuous. Similar arguments apply to , and .
Definition. Let be a sequence of functions from the set to the metric space . Let be the metric for . We say that the sequence converges uniformly to the function if given , there exists an integer such that for all and all in .
Contrast this uniform convergence with pointwise convergence, for which the integer for the corresponding may vary depending on the choice of .
Exercise 21.6 provides an example of a sequence of functions that is pointwise convergent but not uniformly convergent.
[Theorem 21.6] (Uniform limit theorem). Let be a sequence of continuous functions from the topological space to the metric space . If converges uniformly to , then is continuous.
Let be an open set in , and be a point of . We want to find a neighbourhood of such that (see Theorem 18.1).
The idea of finding such neighbourhood is by using the uniform convergence of to (twice) and the continuity of each .
Let . First choose so that the -ball is contained in . Next, using uniform convergence, choose so that for all and for all ,
Finally, using continuity of , take a neighbourhood of such that for any , we have
We claim that carries into and hence into . Note that if , then
Adding them together and applying triangle inequality, we see that , as desired.
Examples of spaces that are not metrizable:
- in the box topology.
- An uncountable product of with itself.
Quotient Topology
A torus is an example of a quotient topology which arises from the Cartesian plane, or the unit square.
Definition. Let and be topological spaces; let be a surjective map. The map is said to be a quotient map provided a subset of is open in if and only if is open in .
Note that the implication is two-sided compared to the continuity definition, which indicates that this condition is stronger than continuity. An equivalent condition is that a subset of is closed in if and only if is closed in ; such equivalence follows from the fact that .
We can also decsribe quotient maps in the following way: We say that a subset of is saturated (with respect to the surjective map ) if contains every set that it intersects (i.e. for those that has a non-empty intersection with , we have that is a subset of ). Hence is saturated if it equals the complete inverse image of a subset of . Saying that is a quotient map is equivalent to saying that is continuous and maps saturated open sets of to open sets of (or saturated closed sets of to closed sets of ).
Two special kinds of quotient maps are the open maps and the closed maps.
[A map is said to be an open map if for each open set of , the set is open in . It is said to be a closed map if for each closed set of , the set is closed in .]
It follows from the definition that if is a surjective continuous map that is either open or closed, then is a quotient map.
There are quotient maps that are neither open nor closed. See Exercise 22.3 for a proof.
Definition. If is a space and is a set and if is a surjective map, then there exists exactly one topology on relative to which is a quotient map; it is called the quotient topology induced by , and is defined by letting it consist of those subsets of such that is open in .
A special case in which the quotient topology occurs particularly often is given as follows:
Definition. Let be a topological space, and let be a partition of into disjoint subsets whose union is . Let be the surjective map that carries each point of to the element of containing it. In the quotient topology induced by , the space is called a quotient space of .
Given , there is an equivalence relation of which the elements of are the equivalence classes. One can think of as having been obtained by 'identifying' each pair of equivalent points. For this reason, the quotient space is often called an identification space, or a decomposition space, of the space .
(With respect to the corresponding equivalence relation , the space can also be notated as .)
We can also describe the topology of in another way. A susbet of is a collection of equivalence classes, and the set is just the union of the equivalence classes belonging to . Thus, the typical open set of is a collection of equivalence classes whose union is an open set of .
[Theorem 22.1] Let be a quotient map; let be a subspace of that is saturated with respect to ; let be the map obtained by restricting .
- If is either open or closed in , then is a quotient map.
- If is either an open map or a closed map, then is a quotient map.
[Theorem 22.2] Let be a quotient map. Let be a space and let be a map that is constant on each set , for . Then induces a map such that . THe induced map is continuous if and only if is continuous; is a quotient map if and only if is a quotient map.

[Corollary 22.3] Let be a surjective continuous map. Let be the following collection of subsets of :
Give the quotient topology.
(a) The map induces a bijective continuous map , which is a homeomorphism if and only if is a quotient map.

Corollary 22.3(a) is also known as the universal property of quotient spaces.
(b) If is Hausdorff, so is .
Corollary 22.3(a) is analogous to the first isomorphism theorem (a.k.a. fundamental theorem on homomorphisms or universal property of quotient groups) in group theory.
(Example 7).
The product of two quotient maps need not be a quotient map. Here is an example (that is nicer).
Let and let be the quotient space obtained from by identifying the subset to a point ; let be the quotient map. Let be the subspace of consisting of the rational numbers; let be the identity map. We show that
is not a quotient map.
For each , let , and consider the straight lines in with gradients 1 and -1, respectively, through the point . Let consist of all points that lie above both of these lines or beneath both of them, and also between the vertical lines and . Then is open in , it contains the set because is not rational.
Let be the union of the sets , then is open in . It is saturated with respect to because it contains the entire set for each . We assume that is open in and reach a contradiction.
Since contains, in particular, the set , the set contains the point . Hence contains an open set of the form , where is a neighbourhood of in and . It follows that
Choose large enough so that , then since is open in and contains , we can choose so that the interval is contained in , then contains the subset of . However, there are many points of that do not lie in (e.g. the points where and is a rational number with .)!
Closed Sets and Limit Points
Closed Sets, Interior, Closure, Neighbourhood
Definition. A subset of a topological space is said to be closed if the set is open.
[Theorem 17.1] Let be a topological space, then the following hold:
- and are closed.
- Arbitrary intersections of closed sets are closed.
- Finite unions of closed sets are closed.
The proof for 1. follows from the (topological) definition of openness and the facts that and . The proofs for 2. and 3. follow from the definition of a closed set and de Morgan's law.
[Theorem 17.2] Let be a subspace of , then a set is closed in if and only if it is equal to the intersection of a closed set of with .
Suppose that , where is closed in . It follows that is open, then by definition of the subspace topology, is open. Observe that , so is open and thus is closed in by definition.
Conversely, suppose that is closed in , then is open in , so by definition of subspace topology again it is equal to where is open in , which means that is closed in . Note that , so is equal to the intersection of a closed set of with .
[Theorem 17.3] Let be a subspace of . If is closed in and is closed in , then is closed in .
A proof of this is a solution to Exercise 17.2.
Definition. Let be a subset of a topological space . The interior of , denoted by , is defined as the union of all open sets contained in . The closure of , denoted by , is defined as the intersection of all closed sets containing . In fact, we have the following relationship:
Another important fact is that is open if and only if , whereas is closed if and only if .
Informally, one can imagine that is constructed 'bottom-up from inside ' whereas is constructed 'top-down from outside '.
[Theorem 17.4] Let be a subspace of ; let be a subset of ; let denote the closure of in . Then the closure of in equals .
Let denote the closure of in . The set is closed in , so is closed in , by Theorem 17.2. Note as well that contains , and by definition is the intersection of all closed subsets of containing , so we must have .
Conversely, we know that is closed in , so by Theorem 17.2, for some set closed in . It follows that is a closed set of containing . Since is the intersection of all such closed sets, we conclude that . Therefore, .
[Theorem 17.5] Let be a subset of the topological space .
a. Then if and only if every open set containing intersects (i.e. the intersection is non-empty).
b. Supposing the topology of is given by a basis, then if and only if every basis element containing intersects .
For (a), it suffices to prove the equivalent statement below:
If is not in , then the set is an open set containing that does not intersect , as desired. Conversely, if there exists an open set containing which does not intersect , then is a closed set containing . By the definition of the closure , the set must contain since it is closed. Therefore, cannot be in .
As for (b), it immediately follows from (a) due to the facts that every basis element containing is an open set and that every open set containing contains a basis element that contains .
Note: we say that is a neighbourhood of if(f) is an open set containing .
Limit Point
Definition. Let be a subset of a topological space and be a point of . We say that is a limit point (or 'cluster point', or 'accumulation point') of if every neighbourhood of intersects in some point other than itself. This can be rephrased as: if is a limit point, then , where denotes an (arbitrary) neighbourhood of , or that belongs to the closure of .
If a topological space is endowed with a metric, then the neighbourhood notation can be written as , where is a (positive) real number, and the arbitrariness of a neighbourhood of is represented by the arbitrariness of the values of .
This is in fact the definition often employed in a calculus or real analysis course.
[Theorem 17.6] Let be a subset of a topological space , then the closure of is equal to the union of and all of its limit (accumulation) points, i.e. if we denote the set of all limit points of by , then .
If is in , then every neighbourhood of intersects (in a point different from ). Thus, by Theorem 17.5, belongs to . Hence . Since by definition , it follows that .
To demonstrate the reverse inclusion, we let be a point of and show that . If happens to lie in , then . If does not lie in , since , every neighbourhood of intersects (Theorem 17.5); as , the set must intersect in a point different from , so and thus , as desired.
An immediately corollary [Corollary 17.7] from here is that: a subset of a topological space is closed if and only if it contains all limit points. This follows from the fact that is closed if and only if .
Hausdorff space
Motivation
In an arbitrary topological space, a sequence of points of the space converges to the point of if, corresponding to each neighbourhood of , there exists a postive integer such that for all .
Notice the lack of a metric and in the definition of convergence of a sequence in an arbitrary topological space. This implies that unlike in and , there may be multiple points of convergence for a single sequence.
In addition, for arbitrary topological spaces, a one-point set may not be closed, unlike the spaces and . The one-point set is not closed in the three-point set equipped with the topology .
These relatively counterintuitive phenomena lead to the notion of Hausdorff spaces, as mathematicians seek to rule them out in the study of topology.
Main Notes
Definition. A topological space is called a Hausdorff space (or, 'is Hausdorff') if for each pair such that they are distinct points, i.e. , there exist neighbourhoods of and of such that they are disjoint.
[Theorem 17.8] Every finite point set in a Hausdorff space is closed.
As the closedness of a set is preserved under finite unions, it suffices to show that every one-point set is closed. If and , then and have disjoint neighbourhoods and by the definition of a Hausdorff space. Since does not intersect , the point cannot belong to the closure of the set . Since the choice of here is arbitrary, it follows that the closure of the set is itself, implying that it is closed.
The condition for finite point sets to be closed is in fact weaker than the Hausdorff condition. For example, in the finite complement topology is not a Hausdorff space, but it is a space in which finite point sets are closed.
There is a name for the condition that the finite point sets be closed: the axiom. (The reason of this strange terminology will be explained in Chapter 4.)
(Note: in the finite complement topology satisfying the axiom follows immediately from the definition of the topology itself.)
Why is in the finite complement topology not a Hausdorff space?
Suppose that where . Assume that there exists a neighbourhood of and of such that . This implies that , which is impossible because both and are supposed to be finite by the definition of the finite complement topology.
[Theorem 17.9] Let be a space satisfying the axiom and be a subset of , then the point is a limit point of if and only if every neighbourhood of contains infinitely many points of .
If every neighbourhood of intersects in infinitely many points, it certainly intersects in some points other than itself, so is a limit point of .
Conversely, suppose that is a limit point of , and assume that some neighbourhood of intersects in only finitely many points, then also intersects in finitely many points, say, . Since is a finite point set, it is closed under the axiom, so is open. This means that
is a neighbourhood of that does not intersect at all, contradicting the assumption that is a limit point of .
As remarked above, the Hausdorff axiom eliminates the possibility of a sequence in a topological space converging to more than one point in .
[Theorem 17.10] If is a Hausdorff space, then a sequence of points of converges to at most one point of .
Suppose that is a sequence of points of that converges to , then there is a positve integer that depends on each neighbourhood of such that whenever . If , let and be disjoint neighbourhoods of and , respectively. Since contains for all but finitely many values of , the set cannot. Therefore, cannot converge to .
In view of Theorem 17.10, if the sequence of points of the Hausdorff space converges to the point of , we can write , and say that is the limit of the sequence .
[Theorem 17.11] Every simply ordered set is a Hausdorff space in the order topology. The product of two Hausdorff spaces is a Hausdorff space. A subspace of a Hausdorff space is a Hausdorff space.
The proofs of the following results are solutions to Exercises 17.10, 17.11 and 17.12 respectively.
Continuous Functions
Let us consider continuous functions beyond real and complex numbers, by generalising them in any topological space.
Definition. Let and be topological spaces. A function is said to be continuous if for each open subset of , the set is an open subset of .
Note that if does not intersect the image set of , then is empty.
This definition is in fact the Global Continuity Theorem, which is considered a consequence if the continuity of a function is defined using the notion of metric spaces (a.k.a. the '- definition').
In fact, in real-valued functions of a real variable, i.e. functions in the form of , the - definition and the definition above are equivalent. To prove that the open set definition implies the - definition, it suffices to show that for each open -neighbourhood of , one can always find a suitable -neighbourhood of such that . As for the converse, see Exercise 18.1.
Detailed proof that the open set definition implies the - definition.
Let be a continuous function. For any in and , the interval is a neighbourhood of in the codomain . Thus, is an open set in the domain . As contains the point , it contains some basis element about .
Choose to be the smaller of the two numbers and , then if , the point must be in , so that , and thus , as desired.
The arguments above can be modified to prove the same for real multivariate functions, though this may require the notion of box topology or (general) product topology to define the standard topology on . Nevertheless, it is shown that the topology on generated by (open) hyperrectangles and -balls are the same.
However, this - definition, as well as the notion of sequential continuity do not generalise to arbitrary topological spaces, but they serve important roles in the study of metric spaces.
If the topology of the range space (codomain) is generated by a basis , then to prove continuity it suffices to check that the inverse image of each basis element is open. Why?
Any open set of can be written as a union of basis elements, i.e.
Thus, since inverse images preserve unions, we have
We can then see that is open if each set is open.
The same applies for a subbasis, as an arbitrary basis element for can be expressed as a finite intersection of subbasis elements. Since , the inverse image of every basis element is open if the subbasis element is open.
[Theorem 18.1] Let and be topological spaces; let , then the following are equivalent:
- is continuous.
- For every subset of , we have .
- For every closed set of , the set is closed in .
- For each and each neighbourhood of , there is a neighbourhood of such that .
If the condition 4. holds for the point of , we say that is continuous at the point .
(1) (2). Assume that is continuous. Let be a subset of . We show that if , then . Since is continuous, if is a neighbourhood of , then is an open set of containing , so it must intersect in some point by Theorem 17.5. It follows that intersects in the point , so that as desired.
Homeomorphisms
Definition. Let and be topological spaces and be a bijection. If both the function and the inverse function are continuous, then is called a homeomorphism.
Note that the continuity of the (bijective) inverse function requires its inverse image of an open set of to be open, which is the same as saying the image of an open set of under is open.
This gives rise to an equivalent formulation of homeomorphisms, which is that is a homeomorphism if and only if is a continuous bijection and for any open set of , the image is also open in .
Homeomorphisms are remarkable in the sense that they act like isomorphisms in abstract algebra: they give bijective correspondences between the collections of open sets that preserve the topological structure between two spaces, as well as topological properties (i.e. properties that are entirely expressed in terms of open sets).
If is an injective continuous map, is the image set , considered as a subspace of , and is a homeomorphism, we say that is a (topological) imbedding (or 'embedding') of in .
[Theorem 18.2] (Rules for constructing continuous functions). Let , and be topological spaces.
- (Constant function) If maps all of into the single point of , then is continuous.
- (Inclusion) If is a subspace of , the inclusion function is continuous.
- (Composites) If and are continuous, then the map is continuous.
- (Domain restriction) If is continuous, and if is a subspace of , then the restricted function is continuous.
- (Range restriction or expansion) Let be continuous. If is a subspace of containing the image set , then the function obtained by restricting the range of is continuous. If is a space with being a subspace, then the function obtained by expanding the range of is continuous.
- (Local formulation of continuity) If can be written as the union of open sets such that is continuous for each , then the map is continuous.
In analysis, taking sums, difference, products or quotients of continuous real-valued functions yields us a continuous function as well. This can be generalised to functions with domains being an arbitrary topological space , but the range still being .
[Theorem 18.3] (Pasting Lemma). Let , where and are both closed in . Let and be continuous. If for every , then and combine to give a continuous function , defined by .
(Note that the requirement that for every is so that is well-defined as a function.)
If and are closed in , consider a closed subset of , denoted here by . Note that
Since is continuous, is closed in (by Theorem 18.1), and thus closed in . Similarly, is closed in and hence closed in . Their (finite) union is thus closed in , so is continuous.
If and are open in , it immediately follows from the 'local formulation of continuity' rule in Theorem 18.2.
[Theorem 18.4] (Maps into products). Let be given by the equation , then is continuous if and only if the functions and are continuous.
(The maps and are called the coordinate functions of .)
There is no useful criterion for the continuity of maps like with the product space being the domain, one might guess that is continuous if it is continuous 'in each variable separately,' but this conjecture is not true. See Exercise 12 for a counterexample proof.
Footnotes
-
A generalisation of the subspace topology (as well as product topology) is the initial topology, which confusingly is also called the induced topology. Hence, the name 'induced topology' will hereon be avoided so that ambiguity does not arise. ↩